ADAS Virtual Protyping
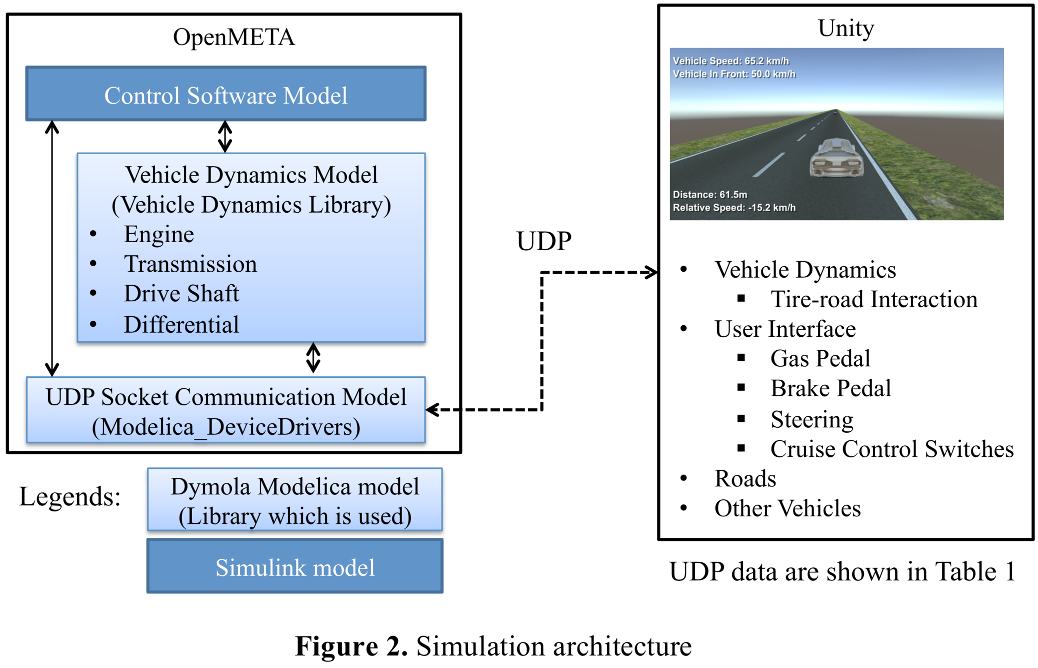
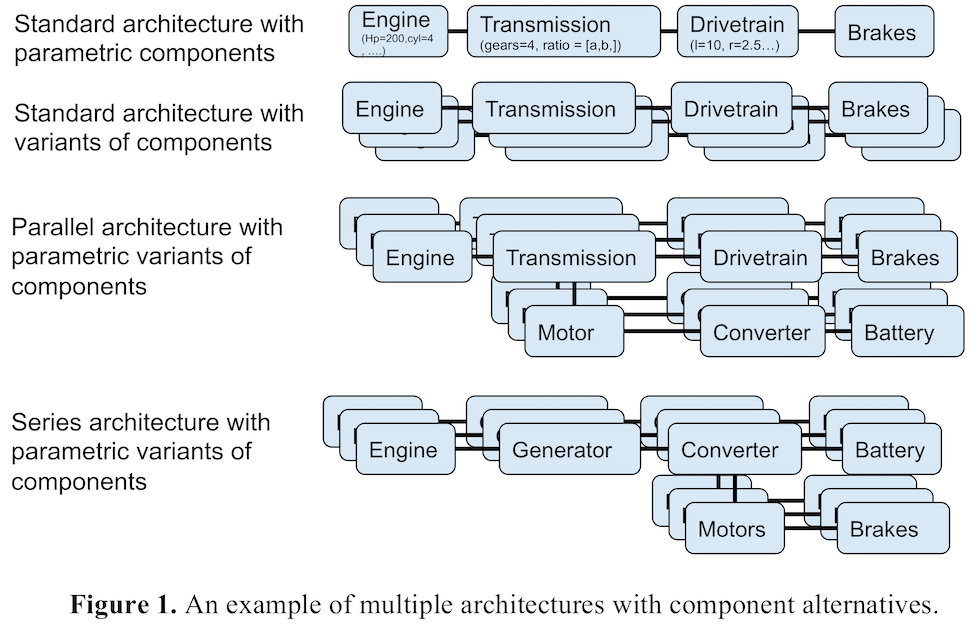
Toyota InfoTechnology Center, in cooperation with Vanderbilt University, used OpenMETA for horizontal integration between Dymola, Simulink, and Unity 3D to enable interactive simulations of drivetrain architectures. Using OpenMETA’s PET (Parametric Exploration) and DSE (Design Space Exploration) features, they could produce simulations for a variety of different architectures and design parameters with less model replication.
“Automotive control software generally has many parameters that should be calibrated in the development phase. PET enables a designer to explore the interactions between parameters in an automated fashion and then displays the results in a way which allows the designer to make tradeoffs and select the parameter set which is most suited to the design criteria.”
Abstract
Automotive control systems, such as modern Advanced Driver Assistance Systems (ADAS), are becoming more complex and prevalent in the automotive industry. Therefore, a highly-efficient design and evaluation methodology for automotive control system development is required.
In this paper, we propose a closed-loop simulation framework that improves ADAS design and evaluation. The proposed simulation framework consists of four tools: Dymola, Simulink, OpenMETA and Unity 3D game engine. Dymola simulates vehicle dynamics models written in Modelica. Simulink is used for vehicle control software modeling. OpenMETA provides horizontal integration between design tools. OpenMETA also has the capability to improve design efficiency through the use of PET (Parametric Exploration Tool) and DSE (Design Space Exploration) tools. Unity provides the key functionality to enable interactive, or closed-loop ADAS simulation, which contains sensor models for ADAS, road environment models and provides visualization.
Yamaura, Masahiro, et al. “Adas virtual prototyping using modelica and unity co-simulation via openmeta.” The First Japanese Modelica Conferences, May 23-24, Tokyo, Japan. No. 124. Linköping University Electronic Press, 2016.